


用于微纳机器人多级磁控投递研讨的体外测验渠道
文章来源:乐鱼网.com
发布时间:2024-01-25 22:17:22
的靶向投递技能在疾病确诊医治、精准药物投递、无创手术等生物医学范畴具有宽广的使用远景。
但是,现有的微纳机器人投递战略面对导航间隔有限和易被流体冲散等应战。一起,微纳机器人的体外测验渠道一般缺少必要的微生理环境,而活体动物模型受限于成像分辨率,对微纳机器人进行实时成像和准确操控仍面对应战。
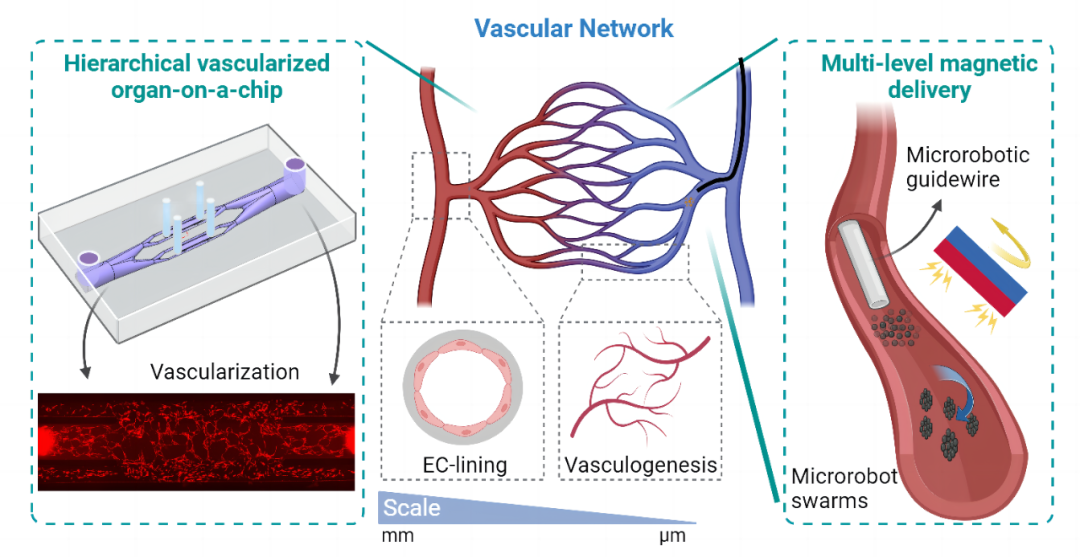
近来,上海交通大学王晓林团队提出了一种根据层级血管化器官芯片的微纳机器人多级磁控投递战略。首要,研讨人员提出了一种层级血管化器官芯片规划,经过微纳3D打印技能制备出多标准微流控器官芯片,进一步结合内皮细胞内衬和血管生成机制,构建出从微米到毫米标准的层级血管网络,为微纳机器人的测验供给了一个兼备成像、操控和微生理环境的体外生物模型。
根据该模型渠道,经过结合栓系磁致动导丝和无栓系游动微纳机器人,提出了一种多级磁控投递战略,有用战胜微纳机器人个别运动才能有限及导丝机器人难以进入细小血管的应战,在杂乱动态生理环境下完成了安稳、高效及长间隔的微纳机器人投递,有望推进微纳机器人在精准药物投递、智能感知与确诊、血栓融化等范畴的使用。
原文标题:根据层级血管化器官芯片的体外测验渠道,用于微纳机器人多级磁控投递研讨
文章出处:【微信号:Micro-Fluidics,微信大众号:微流控】欢迎增加重视!文章转载请注明出处。
开发 /
颅内跨标准靶向给药 /
ROS体系是什么 ROS(Robot Operating System)是一个适
的开源的元操作体系。它供给了操作体系应有的服务,包含硬件笼统,底层设备操控,常用函数的完成,进程间音讯传递
视觉整理 /
等手术中的辅佐定位、造影建模或者是开刀等场景,一般由床旁机械臂体系、操控台和可视化体系等组成。
越来越遭到我们的重视,其间滚动操控是其重要组成部分之一。步进电机芯片作为一种常用的操控芯片,被广泛应
卫星技能与 OpenHarmony 实时操作体系”的主题陈述中宣告, OpenHarmony 操作体系现已成功应
少钱一台? /
处理后出具现场状况的巡检监测陈述,将现场数据可视化。03选型计划经过多轮
,该厂商终究挑选将飞凌嵌入式FETMX8MP-C中心板作为这款智能巡检
少钱一台? /
少钱一台? /
带32位MCU和高精度ADC的SoC产品-SD93F系列开发攻略(十)
FOC_ESQU一向处于0,mcFocCtrl.EsValue不正常,能够从哪查起?
...推荐弧焊机器人
-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载


