

万字综述人形机器人行业
来源:乐鱼网.com 发布时间:2024-03-17 18:18:35

来源:乐鱼网.com 发布时间:2024-03-17 18:18:35
现有机器人为单一功能性机器,从设计出发的时候,就将其运用确定,如:搬运、扫地、焊接。因此绝大部分机器以实际运用出发,以最简易的方式去设计来实现目的。因此对于不同的运用目的与场景,我们均开发不同机器人来应对。导致了现在机器人功能的单一性,没办法完成其他任务。对于人形机器人的开发,主要是面对通用性场景。为什么是人形,一个主要的原因为社会和环境现在均以人为服务对象进行设计,因此从理想状态来看,。理想化来讲,未来人能操作的,不需要对于场景做改造和重新布置,人形机器人能无缝连接代替。因此人形机器人的出现目的是提高机器人的通用性。
2023年为AI大模型爆发及郑重进入商业化运营的第一年,AI大模型可以为人形机器人在软件层面赋能。
2022.06UCBerkeley联合谷歌开发了LM-Nav,实现机器人语义导航。LM-Nav基于GPT-3通过自我监督训练的目标条件策略,训练机器人从大型的、未标记的数据集中进行基于视觉的导航学习。
2023.03谷歌推出的PaLM-E模型实现了多模态大语言模型在机器人场景训练方面的落地,实现了将机器人任务和视觉语言任务融合的训练。
2023.05谷歌召开I/O大会推出新一代语言模型PaLM2,其多语言、理解推理、代码生成等能力较初代PaLM又有了提升。
2023.05英伟达黄仁勋在ITFWorld2023半导体大会表示,AI下一个浪潮将是“具身智能”。英伟达的多模态具身智能系统NvidiaVIMA,标志着AI能力的显著进步。
2023.07斯坦福大学李飞飞教授研究团队推出VoxPoser,通过大语言模型加视觉语言模型指导机器人行动。搭载此类模型的机器人有两方面突破性进展:一是其能够理解自然语言指令,无需复杂的编程语言可完成人机交互;二是无需训练就可以完成复杂指令且产生涌现能力,未知场景下的泛化能力增强。RT-2/Voxposer还改变了决策结果到运动控制的映射方式,无需经过复杂翻译即可将高层级设计映射到低层级动作。当机器人“拥抱”大模型,具身智能迎来曙光。
2022年至今多家科技巨头公司公布其人形机器人原型机,如特斯拉、小米、本田、智元等。于此同时部分人形机器人厂商参与设计生产相关核心零部件,如伺服驱动关节等,未来将通过自研降低整体人形机器人硬件成本。
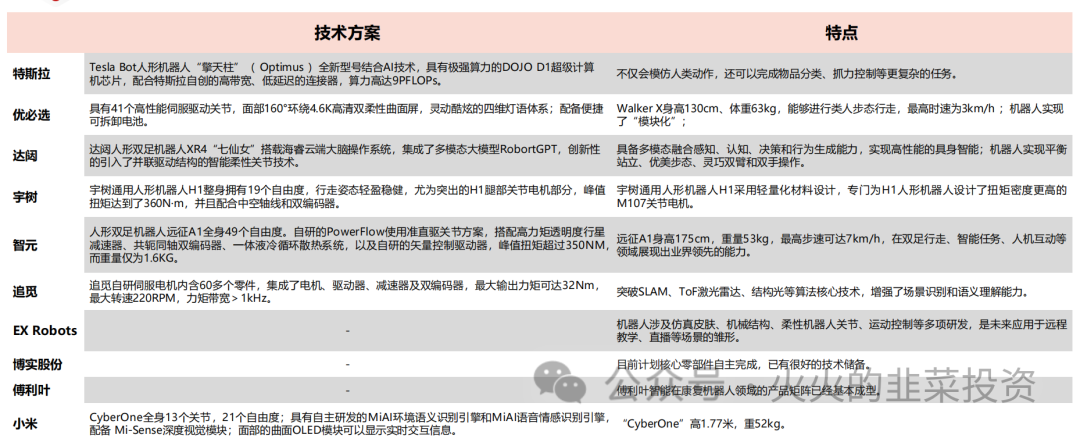
2021年8月,在特斯拉AI日上,马斯克出乎所有人的意料,公布了特斯拉人形机器人(TeslaBot)项目。当时在现场只有一个模型和几页罗列了参数和概念的PPT,马斯克对机器人的市场定位是替代人类去做一些有危险,或重复枯燥的劳动。
2022年AI日上,人形机器人在没有人工辅助和后背连线的情况下就走上了发布会的舞台,代号Optimus(和大家熟悉的变形金刚擎天柱同名)。接下来,马斯克播放了一段Optimus在办公的地方搬运箱子,给花浇水以及在特斯拉超级工厂中工作的演示视频。
2023年5月,最新的特斯拉机器人行走的流畅度比Optimus有所提升;也能灵活地抓取放下物体。在技术方面,采用电机扭矩控制,机器人能做出更轻柔的动作;环境发现与记忆能力被加入到特斯拉机器人中,现在机器人能对周围的环境进行大概的建模;通过捕捉人类动作,特别是手部,训练机器人动作,使其具备类似人的物品抓取能力。
结合了特斯拉的AI技术,即基于视觉神经网络神经系统预测能力的无人驾驶技术,具有极强算力的DOJOD1超级计算机芯片,Dojo架构拥有一个大规模计算平面,极高宽带和低延迟。作为Dojo架构的重要组成部分,D1芯片采用7纳米制造工艺,解决能力为每秒1024亿次。由于每个D1芯片之间都是无缝连接在一起,相邻芯片之间的延迟极低,训练模块最大限度上实现了带宽的保留,配合特斯拉自创的高带宽、低延迟的连接器,算力高达9PFLOPs(9000万亿次)。
全身一共40个机电执行器,12个位于手部,足部两个,利用力反馈技术感知地面。
小米人形机器人名叫**CyberOne**,是小米公司继去年仿生四足机器人Cyberdog后,推出的全新人形机器人。内部艺名“铁大”,具有高情商、可感知人类情绪,视觉敏锐、可对真实世界三维虚拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先技术能力。
CyberOne身高177CM、体重52KG,是一款真正意义上的全尺寸人形仿生机器人。相比于仿生四足机器人而言,人形机器人机械复杂度更高,需要性能更强大的电机、更多的机身自由度、复杂的人形双足控制算法。此次CyberOne支持多大21个自由度,并能实现各自由度0.5ms级别的实时响应,可充分模拟人的各项动作。
机器人的运动性能与各关节电机性能息息相关,而人形机器人对于电机的要求则更为苛刻,需要在尽可能小体积的前提下,爆发出更强劲的动能,以CyberOne上肢关节电机为例,小米自研了一枚重量仅为500g,额定输出扭矩高达30n·m的高效电机,保证上肢灵活性。CyberOne髋关节主要电机瞬时峰值扭矩可达300n·m,配合自研的人形双足控制算法,行走姿态更加平稳。
CyberOne搭载自研Mi-Sense深度视觉模组,结合AI交互算法,使其不仅拥有完整的三维空间感知能力,更可以在一定程度上完成人物身份识别、手势识别、表情识别。在与外界沟通交流方面,搭载了自研MiAI环境语意识别引擎和MiAI语音情绪识别引擎,可以在一定程度上完成85种环境音识别和6大类45种人类情绪识别。
总的来说,CyberOne是一个小脑发达、运动能力超强的人形机器人,具备极高的技术上的含金量和应用价值。**CyberOne**机器人的研发背景是小米公司始终致力于科学技术创新,对人形机器人有着浓厚的兴趣和长远的布局。小米公司自2014年以来,一直在AI和机器人领域投入大量研发资源,推出了一系列智能家居产品,如小米AI音箱、扫地机器人等,积累了大量的技术经验。
小米公司通过与国内外顶尖研究机构和院校合作,建立了强大的开发团队和技术基础。CyberOne的研发历时5年,汇集了全球顶尖技术人才,历经多次迭代,从最初的原型机,到如今的可进行三维重建、姿态平衡控制、运动能力测试等复杂任务,一直在优化提升产品性能。
CyberOne机器人在设计之初,就融入了“机器人”与“人类”两大元素,其外观尽可能地贴近人类形态,符合人体工程学,具有高度灵活性和运动性能,能够与人类进行自然、流畅的交互。其搭载的Mi-Sense深度视觉模组能够实时感知三维空间,实现高精度的手势识别、面部表情识别、姿态识别等,可大范围的应用于生活、教育、服务、娱乐、科研等领域。
商业化:在商业化应用方面,小米公司计划将CyberOne进行进一步的功能拓展和技术迭代,并与各行业合作伙伴携手,共同探索人形机器人在不同场景下的应用。例如,在智能家居领域,CyberOne能成为家庭的智能助手,进行语音交互、任务执行;在教育领域,CyberOne可当作一款新型的教育工具,通过与学生进行互动、教学,提高学生的学习兴趣和效率;在医疗康复领域,CyberOne能帮助患者进行康复训练,提高康复效果;在娱乐领域,CyberOne能成为一款人形机器人玩具,让人们感受到科技带来的乐趣和互动性。
此外,小米公司还将计划将CyberOne与其他小米生态链企业的产品做整合,例如,通过语音识别和控制,实现与小米智能家居产品的联动,打造全新的智能生活体验。
身高高达175cm的“远征A1”,形似人类,体重约为55kg。它拥有超过49个自由度的双足行走和双臂协作能力,这使得它能够在复杂环境中灵活自如地执行各种任务。这款机器人的核心关节搭载了自研的核心关节技术,算力高达200TOPS,具有极高的自主性和智能化水平。
为了增强环境感知和人机交互能力,“远征A1”还配备了RGBD相机、激光雷达、IMU(惯性传感器)和麦克风阵列等多种功能。在实际应用中,它能够承担工业生产、医疗保健、家庭服务等多种任务,极大地提升了人类的工作效率和生活品质。
此外,“远征A1”还拥有广泛的可扩展性。凭借团队在机器人和AI领域多年的研究和实践,未来还将持续完善和提升其性能,以满足持续不断的发展的市场需求。
综上所述,“远征A1”人形机器人是一款高度集成了多项高级功能和技术的智能机器人,拥有非常良好的未来市场发展的潜力和广泛的应用潜力。它将继续为各个行业带来创新和高效的解决方案,推动人类社会的科学技术进步和发展。
优必选科技的大型仿人服务机器人Walker在五年里完成了四次迭代,这是中国首台可商业化人形双足机器人。
WalkerX是优必选科技的一款大型人形机器人,身高130cm,体重63kg,集六大AI技术于一身,搭载41个高性能伺服关节以及多维力觉、多目立体视觉、全向听觉和惯性、测距等全方位的感知系统,拥有视觉定位导航和手眼协调操作技术,自主运动及决策能力大幅度提高,能实现平稳快速的行走和精准安全的交互,可在多种场景下提供智能化、有温度的服务。
在世界机器人大会上,优必选科技的人形机器人完成了从中国走向全球舞台,而后又载誉而归的旅程。2021年,优必选科技在世界机器人大会上完成熊猫机器人优悠的全球首发。熊猫机器人优悠是以大熊猫的形象为设计原型,在大型人形机器人WalkerX的基础上,为迪拜世博会中国馆专属定制。迪拜世博会后,2022年6月,优必选科技再次在世界机器人大会上推出了三款大型仿人服务机器人。第一款是五星红旗机器人——新时代的礼仪员,它以五星红旗为设计灵感,并采用了人形机器人标准的设计语言,身高1.6米,拥有仿人的头部、四肢,外观形态呈现出一定的东亚风格。第二款是高铁机器人——高铁礼宾机器人,这款机器人具有很强的实用性,它不但可以通过先进的运动控制技术为旅客提供优质的服务,还能凭借其智能化的服务在高铁站上为旅客带来惊喜和便利。第三款是运输机器人——物流送货机器人,它具备在仓储和物流场景中自动导航的能力,同时也拥有移动平台运载能力,是物流和电商领域实现无人配送的理想解决方案。
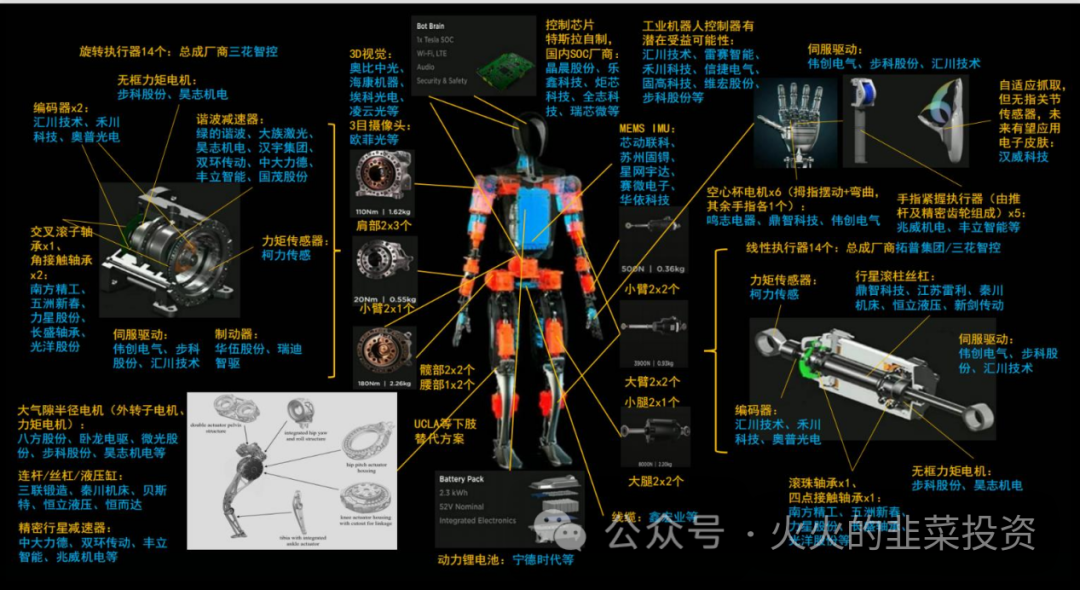
人形机器人整体可分为控制、感知和执行三大系统;控制类似于人类的大脑,对全身进行指令,在人形机器人的软件端体现为模型及算法,硬件端体现为主控芯片;感知类似于人类的各种感官神经,包括器官、神经、大脑皮层等,在人形机器人中体现为各类传感器;执行类似于骨骼肌,包括线性执行器、旋转执行器、灵巧手等。

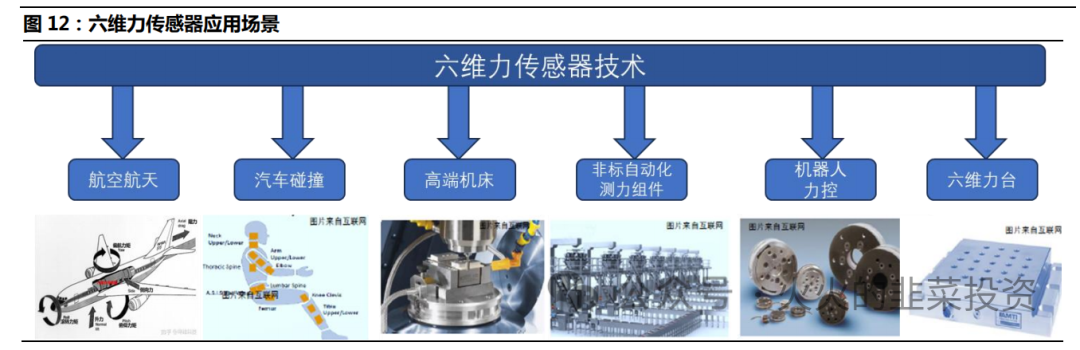
,远超减速器、电机等传统机器人零配件。因此下文将先着重介绍力矩传感器。六维力传感器
人形机器人需要借助多种传感器来采集多模态数据以支持交互。在关注力传感领域中,六维力传感器和关节扭矩传感器
特别有必要注意一下的是,六维力传感器相较于单轴力传感器,其技术方面的要求更高,需要同时具备优良的静态性能、动态性能以及低维度之间的耦合。未来,为了突破这一技术的瓶颈,需要借助六维联合加载标定设备等先进的仪器,对动态特性来优化,并采用矢量运算中的解耦算法来解决技术难题。
力矩传感器是机械臂感知力度的重要部件,又称扭矩传感器,可在各种旋转或非旋转机械部件上对扭转力矩感知进行仔细的检测,将扭力的物理变化转化为精确的电信号,具有精度高、频响快、可靠性好、寿命长等优点。力矩传感器是机械臂的核心部件之一,可为机械臂提供实时的力和力矩信息,实现机械臂对操作对象的力感知,从而协助机械臂完成精细和智能的操作任务。
人形机器人中,六维力矩传感器主要用在对柔顺控制要求高的手腕和脚踝。按照测量维度,力矩传感器可分为一至六维力矩传感器,其中一维传感器、三维传感器和六维传感器最常见。六维力传感器也被称为六轴力/力矩传感器、F/T传感器,用于精确测量X、Y、Z三个方向的力信息和Mx、My、Mz三个维度的力矩信息。人形机器人中,对柔顺控制要求高的手腕和脚踝或将使用六维力矩传感器,而身体的其他关节将使用关节扭矩传感器(单维)。
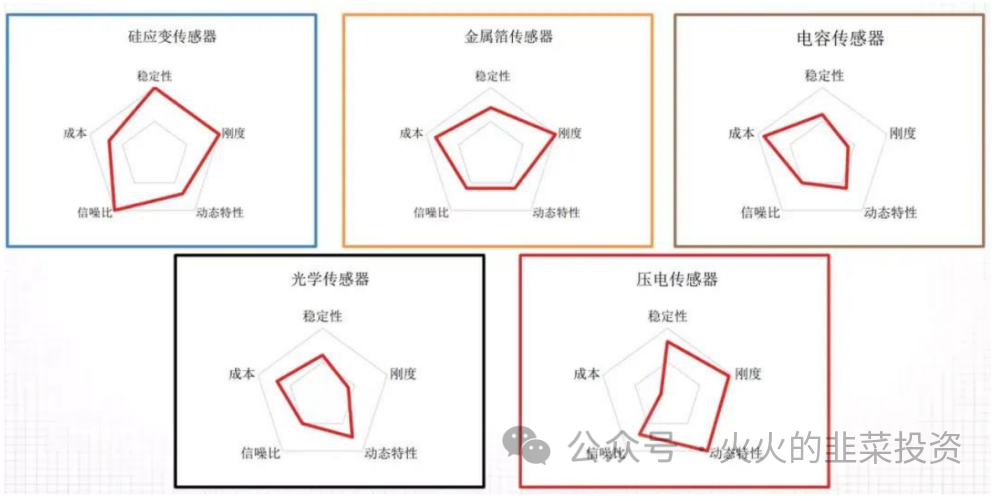
电阻应变式传感器的灵敏元件主要是应变片,他是一种用来测量物体应变的测试工具。大多数通用力传感器内部都有应变片。应变片作为电导体牢固地附着在基片上。当基底被拉伸时,应变片将会变长。反之被压缩时,应变片将会缩短。结果是导致应变片电阻产生一些变化。这就是应变测量原理,通过应变电阻产生变换来确定应变大小。为了生产力传感器,除了应变片外还需要一个弹性体-例如采取不锈钢等。应变片将牢固地黏贴在弹性体上,二者一起发生形变,因此应变片将产生和弹性体一样的变形,这将导致电阻产生一些变化。惠斯通电桥输出信号将提供这些变形信息。这样就可以计算出作用在应变片上的力的大小。这就是力传感器的工作原理。因此应变力传感器主要是通过应变片的形变(外力)改变电阻大小,因此导致电信号输出不同。
力传感器是将力的量值转换为相关电信号的器件。根据所测力的维数不同,力传感器可被分为单轴力传感器和多轴力传感器。
各系列称重传感器以贴有应变片的弹性体为敏感原件,在外接激励电源后,输出与外加负荷(力)成正比例的信号。如果外部载荷作用在传感器上,测量体将发生变形,应变计的电阻也随即改变。这样,通过电阻的变化可测量出载荷大小。这不仅适用于扭矩传感器,也适用于称重传感器、力传感器和别的类型的传感器。然而,扭矩传感器有一些特殊功能。
一维力传感器又称为拉压力传感器,指测量单一维数方向上的力或力矩,同理多轴力传感器就应该检测多个维数方向上的力或力矩。常见的一维力传感器主要是称重传感器,可大范围的使用在汽车衡、配料衡、包装秤等各种电子衡器和自动称重系统。此外,还能选用不同形式的配套仪器,以满足计量、检测、调节及控制等其它应用要求。
与单维力传感器相比,多维力/力矩传感器除了要解决对所测力分量敏感的单调性、一致性问题外,还需解决因结构加工和工艺误差引起的维间干扰问题、动静态标定问题以及矢量运算中的解耦算法和电路实现等,对设备和材料要求比较高,研发制造难度远高于单维力传感器。应变式力传感器的主要生产原材料为应变片和压头,以柯力传感为例,2022年主要营业产品应变式传感器的直接材料成本达81%;六维力/力矩传感器所需应变片数量是单维力传感器的数倍,叠加生产难度大,其成本远高于单维力矩传感器,据百度爱采购数据,ATIFC-NANO17六维力/力矩传感器单价为2万元,未来随着国内应变片及相关产业链研发、生产能力提升以及下游需求打开,六维力/力矩传感器成本有较大下降空间。
随着机器人技术的慢慢的提升,机器臂在喷涂、上下料、分拣、码垛、焊接等应用场景中的技术已相对成熟。这些场景对机器臂能力有一定的要求不高,机器臂大多数时处于无约束条件下,通过轨迹规划、位置控制结合视觉识别、定位等功能即可满足基本应用要求。对于接触丰富的非结构化场景,如在执行医疗手术、维修、装配等精巧操作任务时,环境接触特征多样,机器人与环境的交互频繁,为保证与环境安全、柔顺地进行交互并顺利完成操作任务,需要对机器臂的柔顺控制进行研究。对人形机器人、四足机器人、外骨骼增强机器人等,柔顺控制对于机器人复杂地形通过能力、人机柔顺交互能力等同样关键。
机器人抛光打磨、机器人装配市场,人工替代起步。在工业制造中,很多零件需要在焊接、铸造、成型或加工后进行后处理,包括打磨、抛光和去毛刺。例如汽车的发动机缸体、缸盖、变速箱壳体、汽车轮毂,卫浴五金,航空与能源行业的发动机叶片、涡轮叶片,3C行业的笔记本电脑、平板电脑、手机等。目前国内大部分工件去毛刺加工作业大多采用手工,或者使用手持气动,电动工具进打磨,研磨,锉等方式来进行去毛刺加工,轻易造成产品不良率上升,效率低下,加工后的产品表面粗糙不均匀等问题。同时,打磨会产生很大的粉尘,对人体健康造成危害,企业面临越来越严峻的招工的问题,慢慢的变多公司开始采取机器人加上电动或者气动工具进行自动化打磨。

目前六维力矩传感器主要使用在于汽车碰撞测试,航空航天领域,2022年中国六维力矩传感器销量/市场规模8360套/2.39亿元人民币,随机器人抛光打磨、精密装配等领域的应用得到拓展,预计2027年中国市场销量/规模有望突破42000套/15亿元,CAGR分别为57.97%/52.04%。
2022年中国抛光打磨机器人产量为3860台,安装量为8752台,进口占比55.9%,市场规模96.1亿元/yoy+18.7%,3C、汽车领域分别占18.9%和19.5%。按照每台抛光打磨机器人安装两个六维力矩传感器计划,预计2027年中国抛光打磨机器人对六维力矩传感器的需求为3.0848万个。

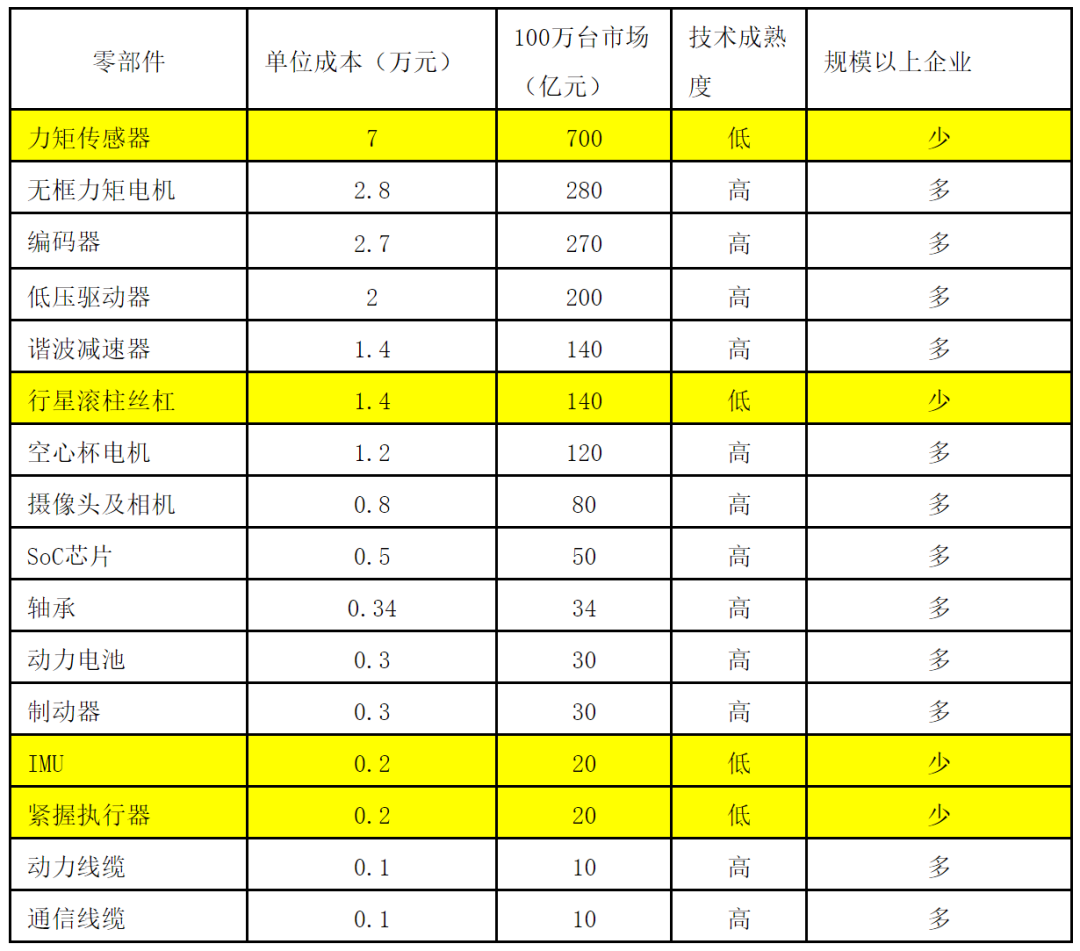
当人形机器人销量100万台时,六维力矩传感器的年销量为400~1600万个,当人形机器人年销量1000万台时,六维力矩传感器的年销量为4000~16000万个。
总体来说,未来力传感器在工业机器人领域的应用市场有局限性,到2027年大约为40~50亿,而在人形机器领域的应用市场则具有想象空间,将绑定人形机器人的大规模商业应用而增长。因此,存量市场到2027年为50亿,增量市场500亿以上(对应100万台人形机器人,每台人形机器人搭配四个六维力传感器,保守预测批量大规模生产后,整个六维力传感器的BOM单价会在3000)。市场规模巨大,且未来零配件作为通用件,不参与不同厂家人形机器人的市场占有率竞争,且毛利高和通用性强,现在市场参与者少,没有龙头效应,因此在一级与证券交易市场还有投资价值。
六维力矩传感器单价昂贵是六维力矩传感器无法广泛普及的重要原因之一。六维力矩传感器单价昂贵,根据e-motionsupply和爱采购网站数据,ATI旗下机器人常用的mini45、axia80m8、nano43型号产品进口价格全都超过3万元人民币,大型传感器omega191进口价格在10.5万元。国产厂商海伯森产品标价为4.5万元,FUTEK实验用大型六维力传感器价格在10万-20万之间。
1)BOM:弹性体(特种钢材)+应变片(硅、金属)+PCB板+粘合胶(环氧树脂等)。海外高端力传感器主要使用硅应变片:别除去运、税费后,硅应变片龙头KYOWA的KFWB型号应变片和HPI的HFP-12-063ZPW应变片的价格分别为696元/片和1148元/片。国内制造商广泛使用较为便宜的金属应变片:根据爱采购网站数据,华兰海产品8-10元/片,中航电测产品10.75-17.86元/片。弹性体、PCB板以及粘合胶价格相对较为便宜。
BOM成本中应变片占比最高,制造费用和研发费用摊销高。按照ATI最新产品Axia80测算,其售价为34560块钱,其弹性体共3根横梁,各搭载4个、共计12个硅应变片,成本在8352~13776元,占比24.2%-39.9%;人工贴片成本占比2.9%。除去剩余价格较为便宜的BOM材料以外,研发费用是六维力传感器成本的主要来源。
海外厂商发展路径:从力矩传感器设备制造商到力控、测量解决方案集成商的转变或将成为全世界力矩传感器企业未来的发展趋势,相比力矩传感器等零部件生产,各个行业不同场景下的力控和测量的集成方案市场规模要更大。以测量解决方案集成商Interface、Baumer为例,双方都是以称重、力矩、温度等传感器和应变片等零部件的制造技术起家,随工业技术的持续不断的发展,放弃了零部件制造商的定位,在原有技术的基础上完善力矩、压力、温度、加速度等各项指标的测试、补偿校准、控制技术与产品线,成为决解方案集成商,并不断向工业自动化、航空航天、建筑、汽车等所有的领域拓展业务。而ATI、HBM、Optoforce等力矩传感器制造商则是被更大的解决方案集成商所收购,成为集团内的硬件技术支撑:HBM自成立以来专注力矩、称重等传感器和应变片等零部件制造,2000年被Spetris收购,并与Brüel&Kjær合并成HBK公司,作为硬件技术辅助集团进军航空航天、汽车、轨道交通等领域的力测试业务;Optoforce在2018年与PerceptionRobotics、onrobot三家公司合并而成现在的onrobot,成为协作机器人解决方案集成商;ATI在2021年被NOVANTA以2.239亿美金收购,作为集团进军工业自动化的技术支撑。宇立仪器、Bota、Aidin等新兴企业的发展历史同样顺应了上述发展历史:宇立仪器、坤维科技在成立后,迅速将原有的六维力传感器技术从汽车碰撞假人和航空航天领域移植到工业自动化、医疗等业务领域,往力控解决方案集成商的方向发展;而Bota、Aidin均衍生于大学的机器人实验室,在突破多维力和力矩的测量技术之后,都选择了从协作机器人专用六维力传感器制造商向力控集成商的方向发展。
2007年,宇立仪器成立,成为中国唯一具有汽车碰撞假人多轴力传感器生产能力的企业,将多维力传感器引入汽车耐久试验领域,与上汽、大众等车企展开合作,解决了这样的领域卡脖子的问题。业务领域从汽车碰撞假人拓展至工业、手术机器人等,同时进军机器人智能打磨行业。坤维科技2018以航空航天六维力矩传感器技术起家,主营工业自动化、医疗、航空航天、工业测试等领域的力控解决方案。宇立仪器拥有六维力和力矩传感器机械加工、贴片、焊接等全流程完整自主知识产权,生产的基本工艺获得CNAS认证,同美国规范一致。

![]()
六维力传感器的安全性通常用过载值衡量,被若测力和力矩超过量程,则输出端只能输出最大量程,而被测力和力矩达到过载值时则会损坏传感器。欧美主流产品在三轴 F/S(力和力矩)均为量程 5 倍左右。ATI 产品普遍采用世界领先的硅应变片技术,产品刚性高,Axia80-Ure 在三轴力矩过载值超过量程8 倍。韩国 robotous 主要是采用电容式技术,产品刚性一般,过载值在量程 3 倍左右。宇立仪器 M43XX 工业级传感器和 M33XX 机器人专用传感器的过载保护值达到 10 倍量程,并且分别提供矩阵解耦和结构解耦功能,可提供稳定而准确的测量能力。
现在六维力传感器的市场运用去协作机器人与打磨机器人,而这两者的量还不大,因此对于上游零配件六维力传感器的市场较小,配套厂商还处于早期发展阶段。
SRI宇立仪器是集研发、生产为一体的技术密集型企业,公司主要经营多轴力传感器、力控打磨设备和汽车测试设备,围绕力测量和力控制,为全球客户提供系列化的解决方案。多轴力传感器包括六维力传感器、三维力传感器、一维力传感器和关节扭矩传感器。力控打磨设备包括iGrinder智能浮动力控、力控打磨工具和成套的机器人智能打磨设备。汽车测试设备包括汽车耐久测试力传感器、汽车碰撞假人力传感器、碰撞力墙和辅助驾驶检测系统ADAS。
2022年SRI全新升级;进军辅助驾驶检测系统ADAS领域;与上汽联合开发辅助驾驶检测系统ADAS。ADAS系统以神经网络模型预测控制算法为核心,充分的利用十几年来SRI在实时控制领域的技术沉淀,实现在电车和传统燃油车的无人驾驶。精确跟踪路径,控制目标车辆GVT运动,满足C-NCAP法规和ADAS功能开发所需的测试任务。重新进入汽车安全领域;以SRI品牌推广汽车碰撞假人传感器,为碰撞假人重新设计,量身定制更高精度的全新力传感器。
成立于2015年的海伯森一直专注于工业级高精度、高可靠性的传感器技术和产品的研发、生产和销售,已向高精度非接触式检测、工业机器人、工业自动化等领域的上百家客户提供了一系列高端光学传感器和高端力学传感器产品以及一站式解决方案。
蓝点触控(北京)科技有限公司(以下简称蓝点触控)成立于2019年,是一家专注于智能机器人前沿力控研发技术及应用的国家高新技术企业。作为一家提供机器人力传感器硬件、力控算法、行业工艺算法的力控方案提供商,蓝点触控自主研发的核心部件已全部实现国产化,已形成包括Wrist六维传感器、Joint关节扭矩传感器、力控工艺应用软件包等多个产品系列。通过深度整合柔性力控算法与工艺算法,蓝点触控已在医疗、卫浴、航空航天、3C、汽车、重工等多个行业规模化落地,应用于打磨、装配、医疗手术机器人、焊接、工业自动化、科研等众多领域。已在中国、美国、德国、西班牙、加拿大、澳大利亚、日本、韩国等众多国家和地区成功落地并得到普遍应用。
刘吴月毕业于西北工业大学,曾任职于航天科技集团,负责多项航天前沿技术开发,具备丰富的航天级力控研发技术和系统级应用经验;研发总监丰继民毕业于中国科技大学少年班,ICT领域连续成功创业者,曾任多家创业公司CTO,擅长复杂通信、实时控制和AI算法;董事兼顾问王田苗是北京航空航天大学博导,北航机器人研究所名誉所长。
蓝点触控原有业务以力传感器研发、生产为核心,主要面向机器人厂商提供力传感器核心零部件产品。目前,公司已推出三大核心传感器产品,包括ST系列协作机械臂六维力传感器、EQ系列工业机械臂六维力传感、Joint系列协作机械臂关节力矩传感器,并搭建了自适应工艺库。基于此,蓝点触控建立了通用柔性力控机器人平台,可应用于打磨、去毛刺、装配、医疗、特种作业等跨行业的多个细分场景。
常州坤维传感科技有限公司成立于2018年,是一家致力于提供高精度力觉传感器(六轴力传感器)及力控解决方案的企业。公司主营智能力觉传感器的研发、制造、销售、及技术推广,开发面向机器人及其他智能装备行业的力觉传感器产品,为机器人及其它智能装备、工业过程监控、产品质量检验、科研测试测量等领域提供力觉测量解决方案及相关产品
其合作伙伴包括节卡机器人、艾利特机器人、遨博智能、越疆机器人、思灵机器人、大族机器人等协作机器人本体厂商,微创医疗(MicroPort)、Rebebot、普爱医疗、苏州威森特、朗和医疗、瀚维智能医疗集团等医疗手术机器人厂商,清华大学、国防科大、北京航大、华中科大、复旦大学、哈工大、北京理工大学等知名高校与研究机构,佳安智能、简控智能、耐视特、安达智能、合动智能等自动化集成商,以及中国航天、航天科工、格力、贝壳、蓝思科技、伯恩光学等知名企业。
未来降本空间:当前六维力传感器的主要成本来源于应变片和人力成本。随着六维力传感器需求扩大,MEMS 技术的应用有望从上述两方面大幅度降低成本。

在六维力传感器中,最少 4 片应变片可构成一个惠斯通电桥,用于测量一维力;为测量六维力,则至少需要 4×6 = 24 片应变计;如需逐步降低耦合干扰,应变片的需求量可达 48或 96 片。根据百度爱采购数据,海外应变片龙头厂商 HBM产品单价达 190元,48 片应变片成本超过 9000 元;国内龙头厂商中航电测产品单价不到 10 元,48 片应变计成本约 480 元;如未来六维力传感器得以大规模量产,厂商可选择采用 MEMS 工艺的硅应变片,单片成本不到 1 元,48 片应变计成本仅不到 40 元。
总结:在机器人整体硬件中,力矩传感器具有占比高、现有规模小、未来放大规模大的特点,上市公司与初创企业基本在同一个起跑线。国内六维传感器大都处于投资早期阶段,估值均在7亿以下,而未来人形机器人成熟将放大其下游投资价值,占10%的人形机器人市场既有50亿的年收入(保守100万台人形机器人出货),保守估计25%的毛利,15%的净利,差不多有7.5亿的净利润,以3C电子零配件或者机器人零配件40倍PE,人形机器人业务对应约300亿市值。
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载