


焊接机器人焊缝偏移的原因与解决方案
文章来源:乐鱼网.com
发布时间:2023-12-30 09:56:33
在自动化焊接过程中,焊缝偏移是一个常见的问题,可能会引起焊接质量不稳定,甚至影响整体工件的性能。本文创想焊缝跟踪小编将探讨焊接机器人焊缝偏移的根本原因,并提出对应的解决方案,以确保焊接过程的精准性和一致性。
1、机器人定位精度不足:焊接机器人对定位精度要求极高,如果出现定位偏差,就可能会引起焊缝焊偏。这通常是由于机器人硬件老化、磨损或者安装精度不高所引起的。
2、机械故障:焊接机器人的核心部件可能因为磨损或松动而导致机械故障,进而引发焊缝偏移。这可能包括焊枪、焊丝喂送机构和运动控制系统。
3、环境干扰:外部外因,如风、震动或其他干扰,可能会引起焊接机器人在焊接过程中产生偏移,影响焊接的准确性。
4、缺乏实时监测:如果焊接系统缺乏足够的实时监测和反馈机制,就很难及时有效地发现焊缝偏移,并采取纠正措施。
1、定期维护:对焊接机器人进行定期维护和检查,确保所有核心部件处在良好状态。修复或更换任何受损或磨损的零部件,以防止机械故障引起的焊缝偏移。
2、环境控制:在焊接区域采取适当的环境控制措施,减小风、震动等外部因素对焊接机器人的干扰,以此来降低焊缝偏移的可能性。
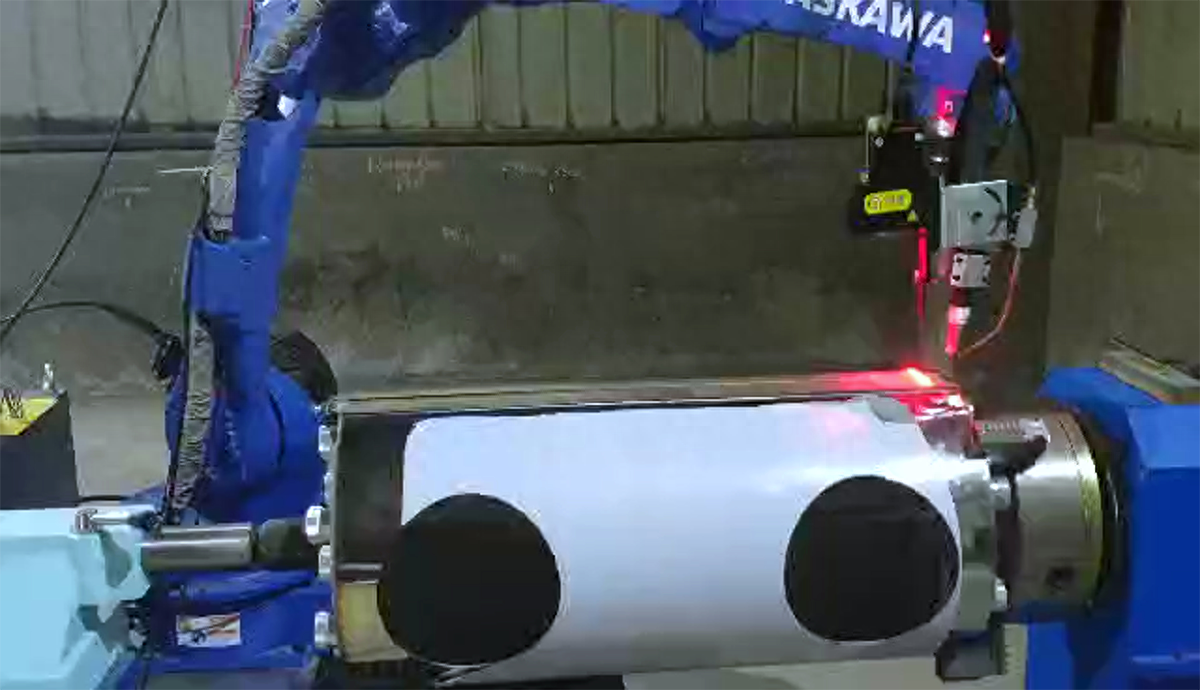
3、引入:集成创造焊缝这种高精度传感器用于实时监测焊接过程中的位置和偏移。这些传感器能及时检测到任何异常,并通过反馈机制通知系统来进行调整,以保持焊缝的准确位置。
4、优化控制算法:使用先进的控制算法,通过实时数据分析和处理,对焊接机器人进行精确的轨迹控制。这有助于纠正任何可能会引起焊缝偏移的运动不稳定性。
焊接机器人焊缝偏移问题的解决需要考虑各种可能性的因素。通过定期维护、环境控制、高精度传感器的应用以及优化的控制算法,可以最大限度地降低焊缝偏移的发生概率,确保焊接质量的一致性和稳定能力。在自动化焊接领域,持续改进和创新是确保高效、可靠焊接的关键。
因为自身高效率、高质量以及方便管理等优点,受到了大部分中小企业的力捧,但是,针对很多要求高精度的
跟踪寻位? /
STM32物联网套件0到1开发实战12-DHT11温湿度传感器实验#物联网
STM32物联网套件0到1开发实战08-串口控制WIFI模块实验2-2#物联网
STM32单片机环境监视测定系统检测一氧化碳甲烷PM2.5对接云平台-矿区检测系统#物联网
...-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载


