

特斯拉人形机器人真机发布!能跳舞能干活完整技术路线公布
来源:乐鱼网.com 发布时间:2024-02-22 17:35:51

来源:乐鱼网.com 发布时间:2024-02-22 17:35:51
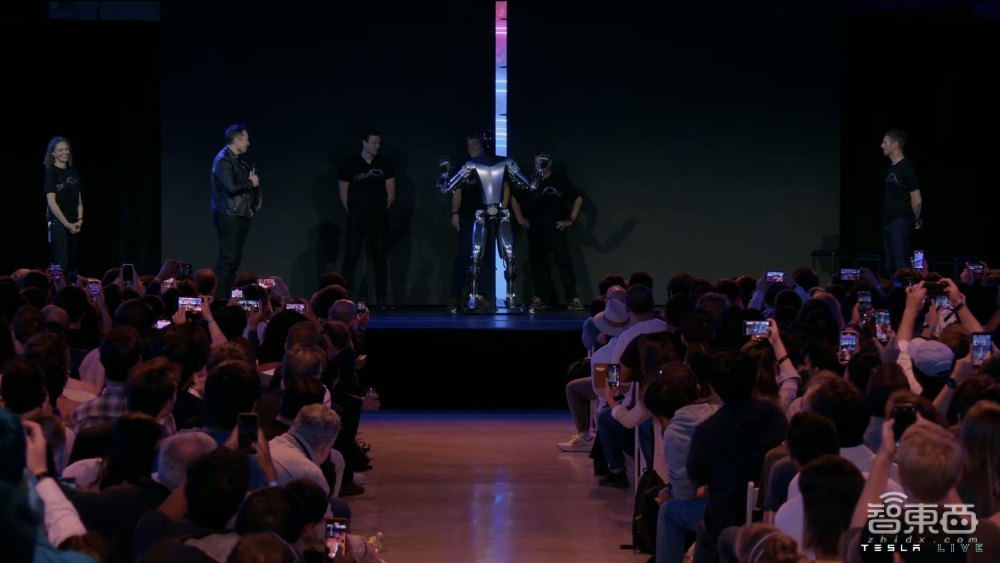
智东西10月1日报道,北京时间9点19分,一个全身电线的人形机器人缓缓走上特斯拉AI Day 2022的舞台,向现场观众挥手打招呼。
去年8月,特斯拉CEO马斯克在第一届特斯拉AI Day上重磅公布特斯拉首款人形机器人“擎天柱”(Optimus)的概念图。今年,为了让人形机器人顺利发布,马斯克将“特斯拉AI Day”从原定的8月19日推迟了40多天!
今天,“擎天柱”终于从一个身着白衣、头戴黑面纱的真人扮演者变成了真的机器人,马斯克的“造人梦”照进了现实。
“我们的目标是尽快制造出有用的仿人机器人。”马斯克说,擎天柱将是一种“能力极强的机器人”,产量非常高,最终将生产数百万台,并且预计成本将远低于汽车——不到2万美元。
按其说法,擎天柱最初会从事一些枯燥或危险的工作,比如在特斯拉工厂周围移动部件,或用扳手给汽车安装螺栓。按照马斯克的设想,未来机器人还能够适用于家庭、做饭、修剪草坪和照顾老人,乃至成为人类的“伙伴”或伴侣。
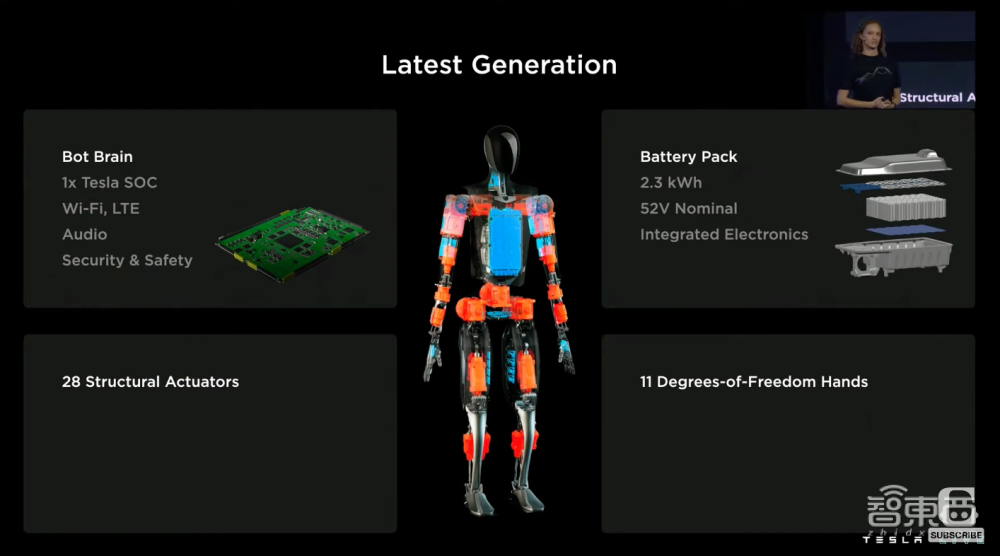
完全体的特斯拉人形机器人“擎天柱”体重73kg,用电功率在时为100W,快走时500W,全身有28个自由度,手部有11个自由度。马斯克称,一个人形机器人的成本大概在2万美元之内,远低于一辆汽车。
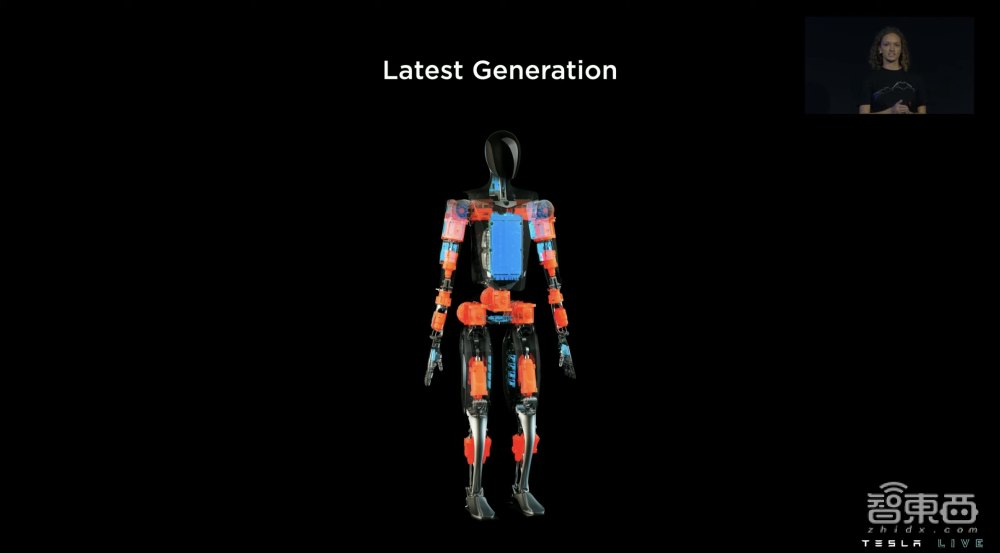
在现场,马斯克展示了工程版“擎天柱”,全身天线的“擎天柱”初始版走下台后,一段视频中展示了人形机器人的才艺。
在特斯拉工厂内,“擎天柱”可以搬起印有特斯拉标志的箱子,并将其运送到其他地方。
“擎天柱”能够拿起放在桌子上的水壶,然后行走至办公室内的花草种植区,为花草浇水。渲染的图片就是机器人的“视角”,看起来除了色彩差异与人类正常看到的图像内容没有特别大的区别。
在工厂里,机器人能将一个长条状的物体从工作台拿下来,再整齐排放至装有相同物体的盒子中。在机器人视角的渲染图中,它能够用颜分开现实世界中的不同物体。如它手持的长条形物体是紫色、工作台是黄色等。
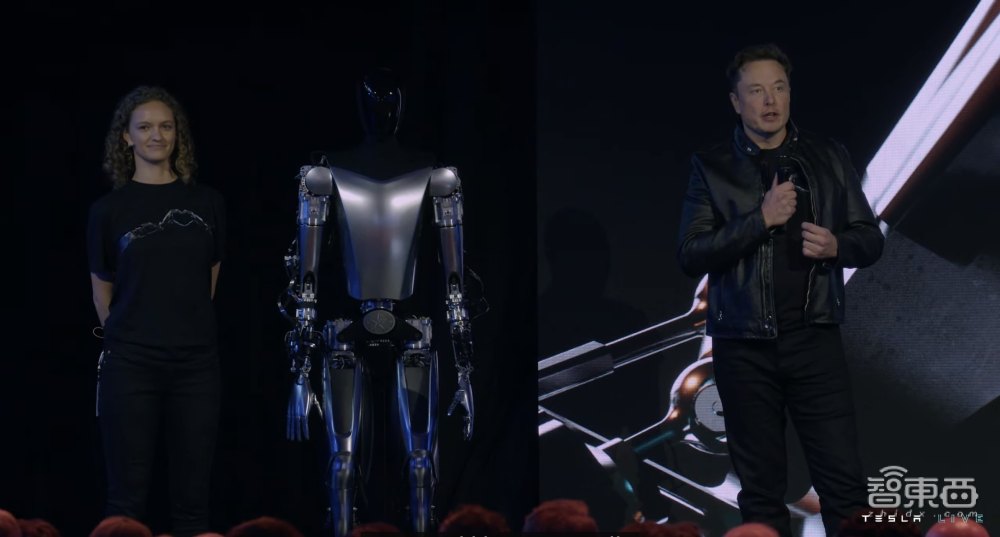
随后,一台更像人的“擎天柱”被推上现场,它一样能张开双手或抬起右手,向台下缓慢打招呼。

不过,与初始版本不同的是,优化版“擎天柱”并没有在现场走动,而是全程由工作人员搬运。
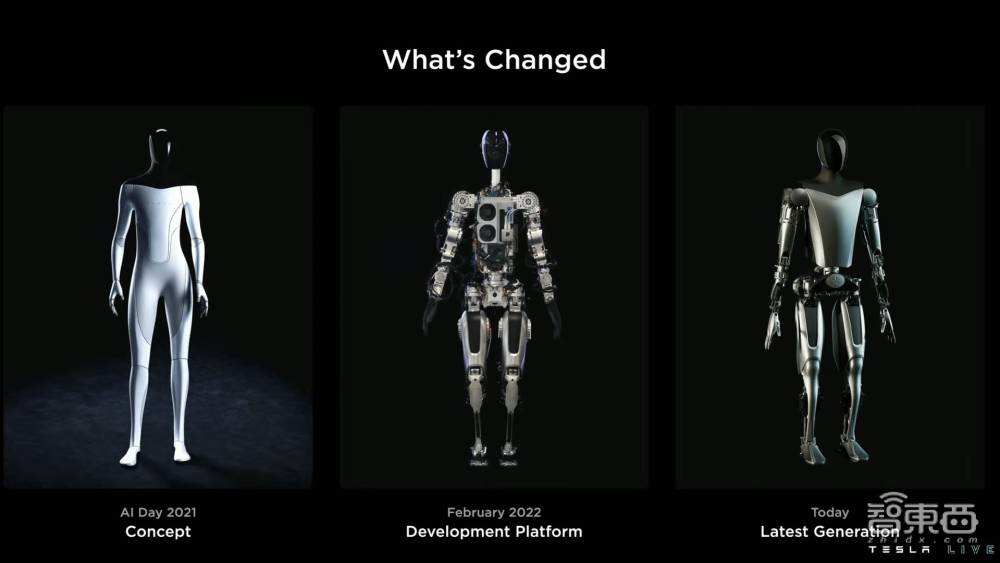
现阶段,特斯拉人形机器人项目从去年2021年AI Day上的概念图,到今年2月,短短六个月就推出了原型机,现在已经有近似完全体的新一代“擎天柱”亮相。

特斯拉第一代机器人从概念、设计、分析、建立、优化、验证经过了反复验证,对于这一新物种来说,拥有较低的成本和较高的工作效率也正是验证这一产品是否能真正推向市场的关键。
,工作电压为52V,能支持人形机器人工作一整天。这个电池组的独特之处在于,它把所有的电池电子都集成到了一起,传感器融合电荷管理等,利用汽车和机能源产品将其融合到一起。这也是特斯拉流线型制造的高效之处。
特斯拉机器人使用了单颗特斯拉自研SoC芯片,不同于特斯拉在汽车上使用的双芯片无人驾驶方案。
与汽车不同,机器人需要处理视觉数据做出迅速反应、基于多种感官输入和通讯,因此装有无线电连接、音频支持以及需要保护机器人本体和人类的安全特性。
结构基础进行了优化,在人形机器人摔倒时不会把变速器和胳膊弄坏,就可以将这一技术应用到机器人之上。毕竟一台机器人的维修成本很高。
研发人员采用了与汽车相同的底层技术,让机器人在所有组件中产生压力,使得其行走控制变得更容易,也不会那么僵硬。
研发人员将人类的膝盖和其运动过程中所受的力线性化,从而学习怎么样让机器人膝盖使用更少的力来构建,让其能实现更好的力度控制,并让相关结构紧密的包裹在膝盖周围。

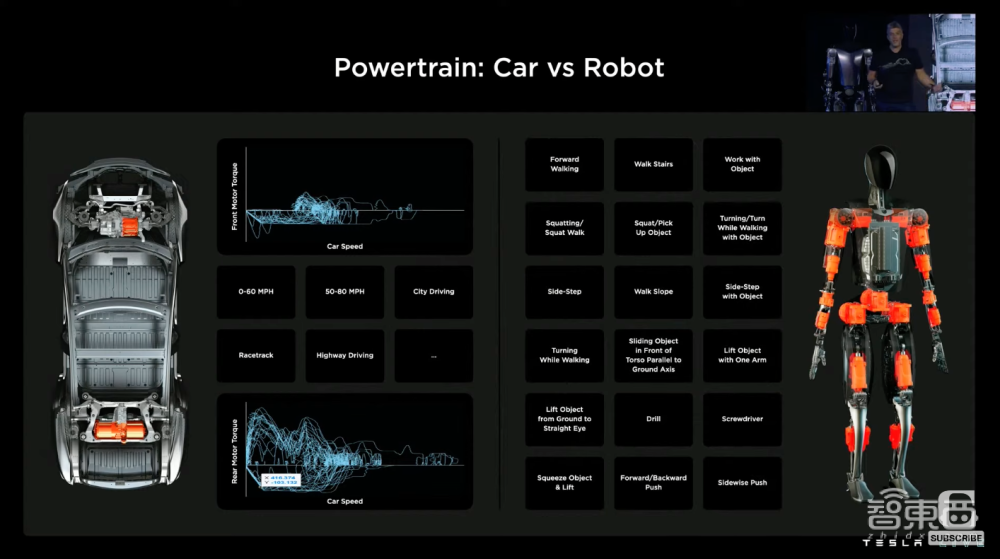
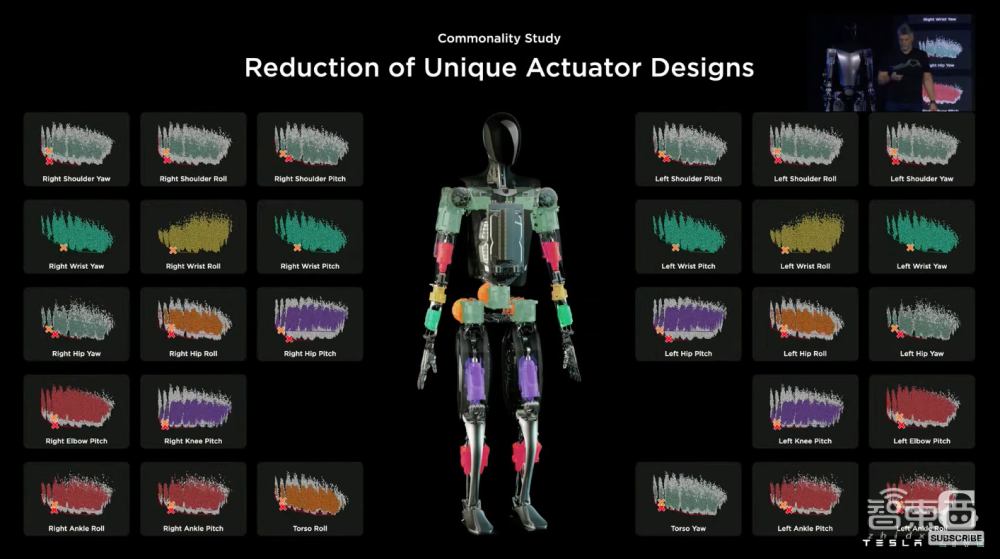
机器人需要转动,研发人员根据扭矩速度轨迹和关节驱动器的效率图,沿着轨道产生的能源消耗、任务与时间的累计能量,就可以定义特定执行机构的样本,并发送到云端。这样一来,就可以缩短其生产成百上千万关节驱动器的时间。
不过,机器人的每个关节都是特定的,28个关节都需要定制规格。因此,研发人需要减少定制的执行器设计,解析它们上传的云并采取共性研究。
“擎天柱”的关节驱动器共有6种,包括三种不一样的规格的舵机、三种不一样的规格类似重量秤一样的牵引执行器等。
在极限范围内来测试,其关节驱动器抬起一架半吨重的钢琴,这也是人形机器人一定要具有的功能。

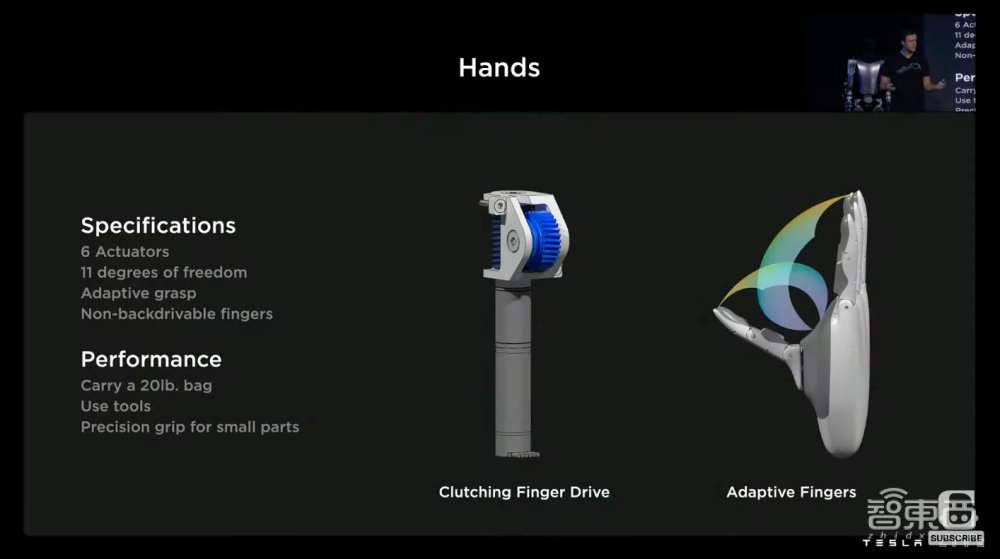
机械手的设计灵感就来自于生物学,和人手一样同样使用五个手指来驱动,既能够实现大口径物体抓取,同时也能满足抓取精巧物体的需求。
我们周围世界的工厂被设计为适于人手抓握的,但也会出现很多我们没见过的物体。因此,特斯拉的人形机器人手指有6个执行器和11个自由度,搭载了能够驱动手指并进行感知的传感器。

手的适应机制是很复杂的,人类可以认识到手在空间中的位置,而这也是其能抓取物体的关键。因此,特斯拉目前也在进行相应测试。
研发人员在模拟测试中,使用无人驾驶模拟器并集成了机器人的运动代码,在今年四月份,“擎天柱”的移动速度很慢。
研发人员演示了擎天柱机器人的行动成长轨迹。从2022年4月份迈出第一步,到2022年7月,让人形机器人解锁了骨盆的应用来保持平衡,2022年8月,让手臂开始发挥作用,直到2022年9月,擎天柱的脚趾也派上了用场,能够准确的看出,随着人形机器人慢慢将更多的关节等利用起来并加以训练,它的移动速度有了明显提升。
步行的过程来看,机器人有身体上的自我意识很重要,如能想到自己四肢的长度是多少、脚有多大,并且怎么样保持平衡,如何协调四肢运动。人类非常容易就能做到这些,但对于机器人来说很难。
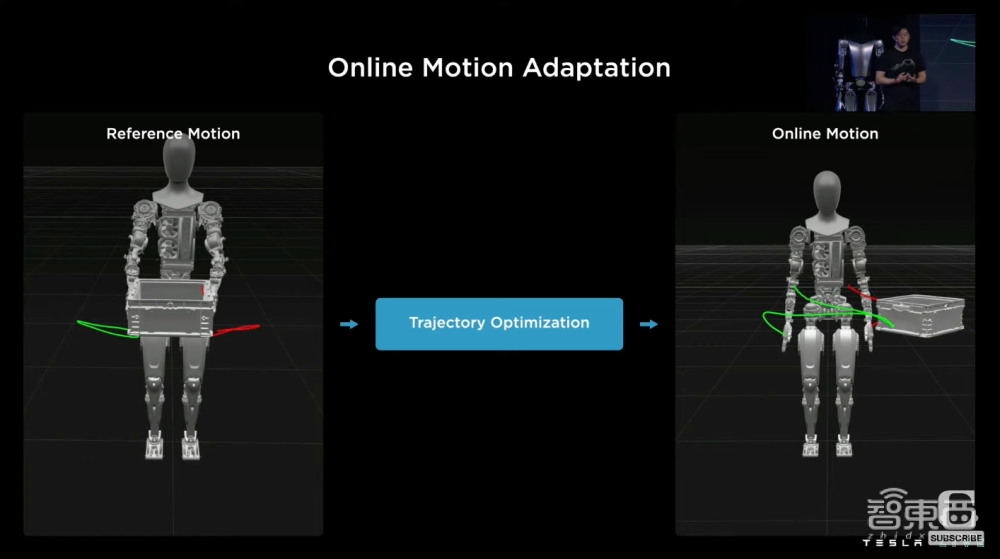
研发人员通过运动计划和控制堆栈,生成机器人运动学模型,然后将所需路径生成底层平台,让总系统参考其轨迹进行训练。
机器人模拟系统中按照其期望的路径规划一条线路,不断添加相互连接的轨迹,并找到能让总系统保持平衡。
在运动训练中,运动规划式是一个理想情形,但实际上将其放到现实世界上是不显示的。在这样的一个过程中缺少几个关键动作,将其放置到现实世界中,会对模型动力学造成影响,特别是像两足动力学这样稳定的系统。
通过跟踪机器人在工作室中的路径来构建更好的机器人模型,并依据真实的情况修正机器人的行为。
操纵真实的物体世界的难题,研发人员将这一步骤分成了两个,首先生成一个自然运动参考系统,然后再将其来优化推广。
人形机器人这一新物种自诞生起就引发了热烈讨论,今年已经有多家知名科技公司发布了人形机器人,前有小米“铁大”,现在特斯拉“擎天柱”在概念版亮相一年后,终于公布了可以走起来的工程版,同时在这次AI Day上,公布了十分完整的技术路线。
人形机器人因其技术集成度及难度都很高,被视作AI领域的终极形态,也将成为未来智能机器人的重点发展趋势之一。
现如今,服务、工业、特种机器人已经深入到社会生活的方方面面,小至家庭中的扫地机器人,大到工厂配送、机械臂等。而人形机器人仍然是一个新鲜事物。
马斯克在人形机器人亮相后说:“无人驾驶汽车对世界产生的巨大影响,使得运输生产力提升上至少提高了半个数量级,未来,擎天柱或许会带了数个数量级的提升。”
此前曾有爆料称特斯拉“擎天柱”预计2023年实现量产,计划在德州工厂部署数千台人形机器人,最终可能会扩展到全球数百万台。如果特斯拉的人形机器人能最终量产,并真正解决其落地难题,有望促进人形机器人的产业高质量发展向前迈进一大步。
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载