


中国农业机器人研究SCI论文产出顶级规模产业化发展还需跟进
文章来源:乐鱼网.com
发布时间:2024-01-30 02:32:17
袁建霞[1],张秋菊[1],胡小鹿[2],柏雨岑[2],韦线. 中国科学院科技战略咨询研究院;
2. 中国农村技术开发中心;3. 浙江大学生物系统工程与食品科学学院;4. 中国农业机械化科学研究院农业机器人是一种以农产品为操作对象,兼有人类部分信息感知和肢体行动功能,可重复编程的柔性自动化或半自动化设备,是综合了多种学科交叉的智能机械。
运用农业机器人代替人力不仅能降低劳动强度,还可提高劳动效率,帮助解决劳动力稀缺的难题,受到农业人口较少的发达国家的重视,也成为国际农业装备产业技术竞争的焦点之一。
我国对机器人的研究起步相对较晚,但产业发展迅速,工业与信息化部、发展改革委、财政部于2016年3月联合发布《机器人产业高质量发展规划(2016—2020年)》,为农业机器人的逐步发展提供了新机遇。

研究前沿分析在检索到的SCI论文数据集中遴选出被引频次排名在Top10%的论文,再邀请专家甄选,选出重点论文逐篇进行内容解读,然后根据研究主题进行聚类分析,获得当前农业机器人的研究前沿方向及重点研究内容。
说明近年来农业机器人研究产出规模逐步扩大,处于研究的上升期,慢慢的受到关注。1. 领先国家
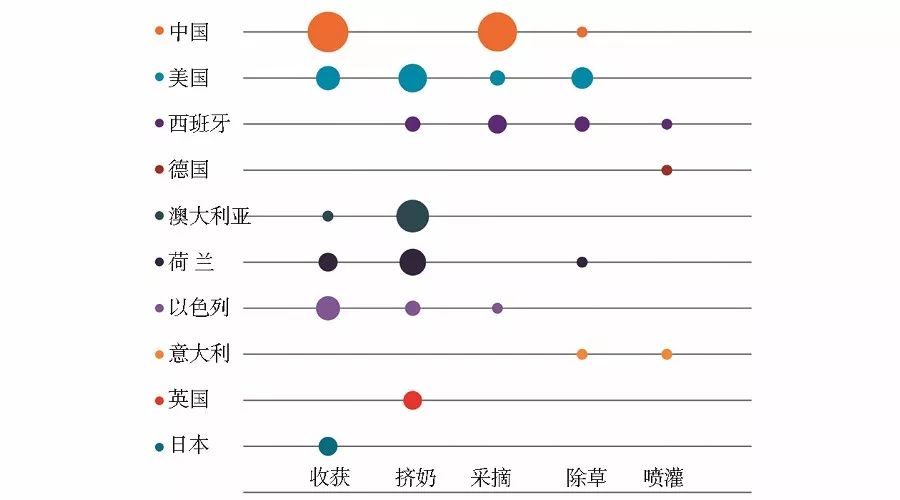
2013—2018年,农业机器人SCI论文来自全球52个国家,其中数量最多的前10个国家依次是中国、美国、西班牙、德国、澳大利亚、荷兰、以色列、意大利、英国和日本,10个领先国家的论文数量合计426篇,约占论文总量的88%。
论文数量的年度变化显示,中国的论文数量逐年增加,且增势明显,年度论文数量2014年开始超过美国跃居第一。
在农业机器人相关的SCI论文中,研究主题集中在作业场景与关键技术。其中中国比较关注收获机器人和采摘机器人研究,而美国、澳大利亚、荷兰和英国等更关注挤奶机器人,以色列和日本较为关注收获机器人,德国与意大利关注喷灌机器人。

对检索到的与农业机器人相关的SCI论文进行筛选、判读,研究主题聚为3个前沿方向,分别是作业对象识别和定位算法优化,导航和路径规划算法优化,以及作业对象的分选与监测研究。
在作业对象识别和定位算法优化方面,主要研究对番茄、甜椒、苹果、柑橘和荔枝等蔬果及杂草和作物病害等的识别,中国在这一方向上的研究产出相对较多。
美国在作业对象的分选与监测研究上产出相对较多,研究重点包括果实分选及水产养殖监测和牛奶产量与风险监测等。
全球农业生产的集约化和规模化进程不断加快,农业劳动力不断减少,因此对农业机器人的需求将持续加大。
由于农业环境和作业对象的复杂性、多变性和非结构性,农业机器人研发难度大,作业效果有待提升。在作业对象识别和定位、导航和路径规划、作业对象的分选与监测等前沿方向上,要以开放创新的理念开发和应用新技术,促进具有多环境适应性的智能农业机器人的研发。
随着云计算、大数据和人工智能等新一代信息技术与农业技术的深层次地融合,农业机器人作为新一代智能化农业机械将突破瓶颈并得到普遍应用。
本公众号所发布内容,均受著作权法保护,没有经过授权转载、编译或摘要,我们将保留追究法律责任的权利。
平台声明:该文观点仅代表作者本人,搜狐号系信息发布平台,搜狐仅提供信息存储空间服务。
...
上一篇:一同向未来愿望更精彩
下一篇:工业机器人行业的技能人才形成
-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 乐鱼网.com-乐鱼网官方-乐鱼网最新版下载
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载
鲁公网安备 鲁ICP备20019457号
合作网站:乐鱼网.com 乐鱼网官方网 乐鱼网最新版下载


